I always loved the look of the iMac G4 and the design of its base. I recently came across one in a trash and decided to give it a second life.
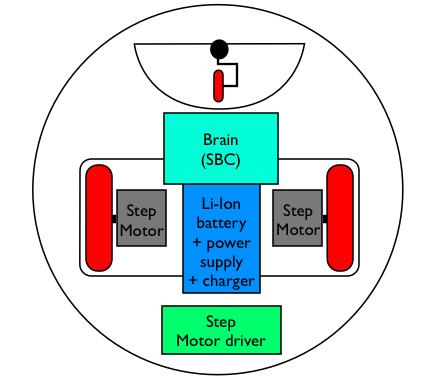
I wanted to build a robot platform that would be fun to play with and look cute. The base of the iMac was perfect for that and this is how I envisioned to fill it in order to give it life after removing the Mac hardware.
This is a two wheels robot powered by two step motors (from a old printer). The power comes from a Li-Ion battery and I want to use this project to learn more about building my own charger and power conditioning circuits.
The brain of the robot is a old 486 SBC (PC-104 form factor) that has been sitting in my junk pile for a long time. The 100MHz CPU gives plenty of processing power and its 16MB of RAM even allow the board to run Linux. I'm going to use a 64MB compact-flash disk to store the OS. The CF card is going to be connected using a CF-PCMCIA adapter plugged in a PC-104 PCMCIA adapter. This adapter will allow the use of a wireless card that will permit remote access and remote control of the robot.
The PC-104 bus (ISA) gives plenty of room for future expansion which is great since I'm planning to add some sensors to make the robot aware of its surroundings and hopefully turn it into a fully autonomous robot.